Математический аппарат для представления и обработки точечных изображений
При решении задач распознавания алгоритм вычисления оценок обладает свойством универсальности. Он основан на вычислении приоритетов типа мер близости распознаваемого объекта с эталонными объектами по системе ансамблей признаков.
По сравнению с другими классами алгоритмов данный алгоритм отличается более слабыми требованиями в отношении исходной информации и позволяет решать задачи распознавания статистического содержания. Функционалом качества, по значению которого принимается решение, служит величина ошибки распознавания. Таким функционалом служит скалярное произведение нормированных векторных сигналов, однозначно связанное с величиной расстояния между этими сигналами.Применение алгоритма вычисления оценок к задачам распознавания сигналов и изображений базируется на широко используемом геометрическом подходе для представления и обработки сигналов. В задачах распознавания изображений в центре внимания оказываются геометрические факторы, связанные со взаимным расположением фигур (подмножеств) в рассматриваемом пространстве. Поэтому наряду с линейным пространством Lвводится аффинное пространство J,элементами которого служат точки. Если зафиксировать какую- нибудь точку 0пространства Jи соединить ее радиусами-векторами со всеми остальными точками, то множество всех радиусов-векторов пространства Jи составит линейное векторное пространство L.Обычно точке 0соответствует нулевой вектор из L. При обработке сигналов особый интерес представляют четыре вида пространств L: линейное действительное пространство R,линейное комплексное пространство C,псевдолинейное кватернионное пространство Hи псевдолинейное октавное пространство O.Критерием выбора из четырех
перечисленных выше пространств для представления сигналов при решении задачи распознавания является степень информативности меры схожести векторных сигналов в виде реальной части их скалярного произведения.
 - два подмножества одинаковой мощности 5 в аффинном пространстве, задающие одноименные векторные сигналы Q и P (рисунок 3.3). Радиусы-векторы
- два подмножества одинаковой мощности 5 в аффинном пространстве, задающие одноименные векторные сигналы Q и P (рисунок 3.3). Радиусы-векторы являются
являются
элементарными векторами (ЭВ) или моновекторами. Если с аффинным пространством сопоставляется линейное действительное пространство R, то ЭВ содержат в качестве своих компонент вещественные числа, равные длинам проекций точек подмножеств на оси системы отсчета [159]:

Для этого случая сигналы Q и P являются вещественными векторными сигналами.
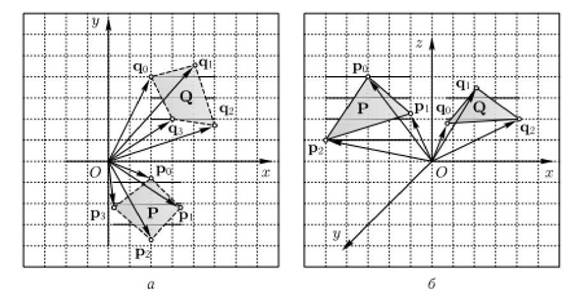
Рисунок 3.3 - Векторные 2D- и 3D-сигналы, заданные подмножествами точек Q и P
Когда с аффинным пространством сопоставляется линейное комплексное пространство C, то моновекторы сигналов Q и P задаются комплексными числами:

Такие сигналы называется комплекснозначными сигналами.
Если же с аффинным пространством сопоставляется псевдолинейное кватернионное пространство H,то моновекторы представляются векторными кватернионами:

Решение задачи распознавания векторных сигналов связано с формированием меры схожести εmраспознаваемого сигнала с
с
каждым из эталонных сигналов алфавита классов и
алфавита классов и
принятием, с теми или иными вариациями, решения в пользу класса, эталонный сигнал которого наиболее близок к распознаваемому сигналу Q (рисунок 3.4). Различие (близость, схожесть) между двумя ЭВ q и р определяется величиной реальной части скалярного произведения нормированных векторов q и р.
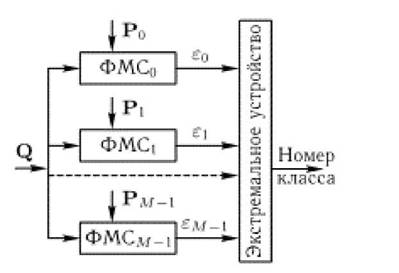
Рисунок 3.4 - Структура устройства распознавания сигналов,
где ФМС - формирователь меры схожести
3.4.2.
Еще по теме Математический аппарат для представления и обработки точечных изображений:
- ОГЛАВЛЕНИЕ
- Математический аппарат для представления и обработки точечных изображений
- ВЫВОДЫ ПО ГЛАВЕ 3