Модель формирования весовых коэффициентов на основе метода Калмановской фильтрации и метода аналитического конструирования
Оценка оптимальных весовых коэффициентов W ( к) в соответствии с методом калмановской фильтрации вычисляется по рекуррентной формуле
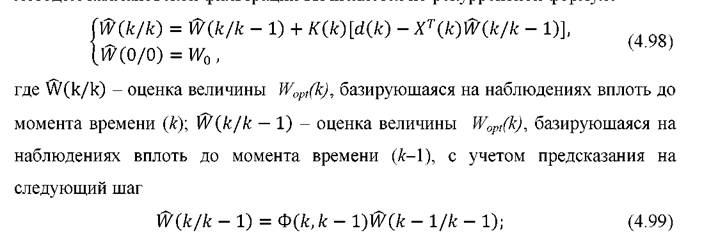
K(k)- вектор размера 1 ? nкоэффициентов передачи фильтра Калмана.
Вектор K(k) будем искать из условия минимизации дисперсии ошибки оценивания

где P(k) - симметричная матрица размера n ? n, на главной диагонали которой расположены положительные элементы, подлежащие минимизации.
Обозначим

Тогда
Для наглядности дальнейших выкладок опустим в (4.103) обозначения шагов итераций в матрицах и векторах.
209

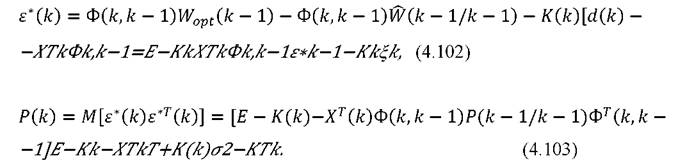
Если для оценивания Wopt(k)используется информация d(k)на текущем шаге итерации, то ковариационная матрица ошибки прогноза в этом случае будет определяться следующим образом:

где Р ( к/к — 1 ) - ковариационная матрица ошибки после фильтрации на (k -1) шаге. Применительно к обозначениям, принятым выше, P(k∕k) = P(k).
Тогда уравнение (4.100) перепишется в следующем виде:

Для нахождения вектора коэффициентов передачи фильтра Калмана K(k) необходимо выделить полный квадрат относительно него. Введем для этого вспомогательные матрицы Sи Rтакие, что
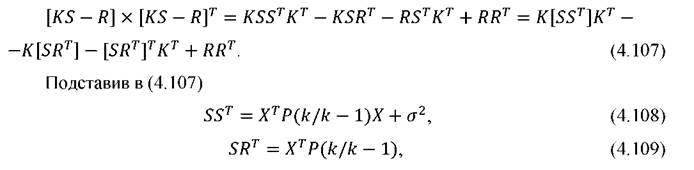
получим
Отметим некоторое свойство матрицы ковариации ошибки.
Рассмотримэлементы матрицы

Из (4.111) и (4.112) легко видеть, что

следовательно,

Из определения ковариационной матрицы Р (к/к —1 ) следует также, что

Из (4.108) и (4.109) найдем

Следовательно P(k/k) будет достигать минимума на диагональных элементах при таком выборе K(k), чтобы равнялось нулю второе слагаемое в (4.116), то есть

Это возможно тогда, когда
KS = R. (4.118)
Отсюда, используя (4.108) и (4.109), найдем:
______________________________________________ т
Вернемся к полным обозначениям шагов итераций:

Выражение (4.107) перепишем в виде:

Для вычисления величин, стоящих в левых частях уравнений (4.97), (4.105), (4.120), (4.122), необходимо знать начальные значения для W (0 / 0 ) и P(0∕0). Существуют рекомендации по выбору этих значений, использующие некоторую априорную информацию о статистиках процессов [222]. При отсутствии подобной информации в качестве P(0∕0) выбирается единичная матрица, а в качестве W (0 / 0 ) - значения +1, -1, +1, -1 и т.
д.
Однако для адаптации приема сигналов в ОЭУ МПИ по методу калмановской фильтрации необходимо еще знание закона изменения оптимальных весовых коэффициентов и интенсивности шума в наблюдателе, чего почти никогда нет в практике. Избежать трудности, связанной с необходимостью знания переходной матрицы состояния объекта в случае применения фильтра Калмана, удается, сделав предположение о некотором неизвестном, квазистационарном характере изменения оптимальных весов:

где ( к) - белый гауссовский шум с нулевым средним и

Такое предположение правомерно, если не происходит быстрого изменения уровня освещенности, что влечет за собой необходимость относительно медленного изменения вектора оптимальных весовых коэффициентов.
Элементы матрицы Lхарактеризуют неопределенность, связанную с предположением о квазистационарности условий получения изображения.
Для расчетов по методу Калмана с такой моделью выражение (4.121) примет вид
Однако остается обязательным знание σ2и матрицы L.
Структурная схема процесса калмановской фильтрации приведена на рисунке 4.15.
212
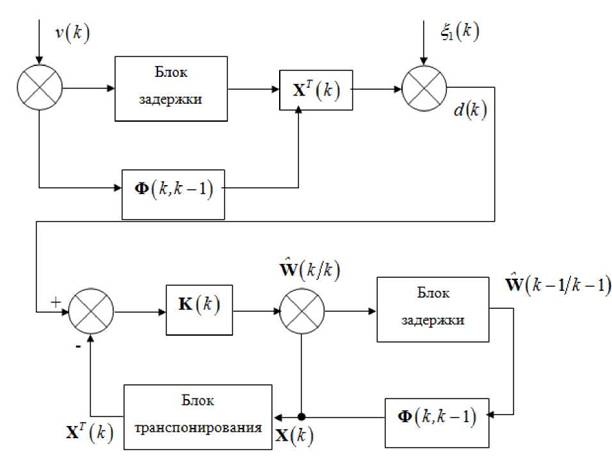
Рисунок 4. 15 - Структурная схема процесса калмановской фильтрации
Таким образом, математическая модель формирования весовых коэффициентов методом калмановской фильтрации примет вид:

При описании модели формирования на основе метода аналитического конструирования необходимо рассмотреть сначала синтез алгоритмов фильтрации в непрерывном виде, а затем перейти к дискретному представлению.
Необходимо построить оценку W (к) для Wo p t(t) , субоптимальную в смысле минимума функционала [223]:

Наилучшая оценка в смысле минимума функционала (4.127) является решением уравнения:

где
Прежде чем приступить к синтезу адаптивного алгоритма, отметим ряд свойств невязки наилучшего линейного фильтра.
Невязка фильтра, описываемого выражениями (4.128) - (4.129), ортогональна всем предшествующим измерениям выхода:

Невязки в различные моменты времени ортогональны:

Невязка фильтра, описываемого выражениями (4.128)-(4.129), ортогональна вектору измерений X(t):

Любое из этих свойств, являющихся необходимыми и достаточными условиями минимума функционала, может быть использовано для синтеза устойчивых алгоритмов вычисления оценки W ( к) . Однако уравнение (4.131) гарантирует минимум функционала только в том случае, если вычисляемая оценка обеспечивает ортогональность невязки всем предшествующим невязкам или измерениям выхода.
Таким образом, будем считать (4.131) и (4.132) системами из бесконечного числа уравнений. Можно обеспечивать ортогональность текущей невязки к
одному измерению выхода или одной невязке, отстоящей в прошлом на фиксированное малое время, то есть например, обеспечить:

где t1
Еще по теме Модель формирования весовых коэффициентов на основе метода Калмановской фильтрации и метода аналитического конструирования:
- ОГЛАВЛЕНИЕ
- Модель формирования весовых коэффициентов на основе метода Калмановской фильтрации и метода аналитического конструирования