Прогнозирование поведения подвижной платформы системы обработки и анализа спектрозональных изображений в условиях неопределенности
В современном приборо- и машиностроении существует необходимость прогнозирования результатов вычислений в условиях, когда на объекты управления действуют различные внешние возмущающие факторы.
Как правило, для подобных расчетов используются методы регрессионного анализа [224]. Однако данные методы применимы в случае, если исследуемая область описывается линейными функциями. В противном случае для прогнозирования выходного результата используются методы мягких вычислений, основанные на теории нейро- и адаптивных нейро-нечетких систем вывода, которые позволяют получить максимально приближенный результат к эталонному значению.
Рассмотрим прогнозирование результата вычислений для MISO-системы имеющей четыре входа и один выход. При этом оценка точности прогнозирования проводится на основе минимизации коэффициента среднего квадратического отклонения (RMSE). С целью повышения точности прогнозирования в условиях неопределенности, то есть минимизации RMSE, предложено использовать следующую адаптивную нейро-нечеткую систему вывода на основе обучаемой трехслойной сети [225].
Процесс обучения трехслойной нейронной сети обеспечивает постоянное изменение её весов при котором достигается минимальное значение
при котором достигается минимальное значение
суммарной квадратической ошибки на её выходе:

где у - текущее значение на выходе нейро-нечеткой сети; уэт - эталонное (требуемое) значение на выходе нейро-нечеткой сети.
В качестве критерия минимизации выхода нейронной сети по всей обучаемой выборке используется коэффициент RMSE.
Обучение нейро-нечеткой сети обратного распространения происходит с помощью минимизации функции ошибки путем модификации весов её связей.
Функция ошибки eнаходится по методу наименьших квадратов:
Причем для нахождения весов обратной матрицы первого слоя расчет новых весов осуществляется по формуле

где δ- скорость обучения нейро-нечеткой сети; уii- выходное значение нейрона в данном слое.
В дальнейшем процесс обучения носит итеративный характер и идет по следующему алгоритму:
1. Выполнение расчета весов.
2. Запоминание обученных весов.
3. Расчет новых весов.
4. Переход к пункту 1.
5. Обучение до выполнения заданного количества итераций, либо до сведения ошибки к минимальному значению, переход к пункту 4.
6. Увеличение шага на +1 в обучаемой выборке.
7. Переход к пункту 1.
8. После прохода всех 10 выборок (таблица 4.1), процесс обучения останавливается.
Методами математического программирования продолжим процесс обучения адаптивной нейро-нечеткой системы вывода. Приведем данные для процесса обучения выборки для количества итераций (КИ) КИ = 50 по каждому из входных обучающих наборов (всего 50x10=500 циклов обучения) и скорости обучения δ =0,9.
В таблицу 4.1 сведем данные об ошибке на каждом выходе сети.
Таблица 4.1. Ошибка на каждой итерации процесса обучения
| № выборки | Выход до обучения | Выход после обучения | Ошибка |
| V | У Ум | Ае | |
| 1 | 2 | 1,48 | 0,52 |
| 2 | 2 | 1,48 | 0,52 |
| 3 | 1 | 1,42 | -0,42 |
| 4 | 4 | 4,53 | -0,53 |
| 5 | 5 | 4,53 | 0,47 |
| 6 | 3 | 2,93 | 0,07 |
| 7 | 5 | 4,49 | 0,51 |
| 8 | 1 | 1,45 | -0,45 |
| 9 | 2 | 2,22 | -0,22 |
| 10 | 1 | 1,59 | -0,59 |
| RMSE | 0,46 | ||
Минимизация RMSE осуществляется за счет уменьшения и увеличения КИ и изменения значения скорости обучения.
Рассмотрим динамику измененияпараметра RMSE при увеличении количества итераций от 50 до 100 и скорости обучения δ=0,7 и δ=0,9 (таблица 4.2).
Таблица 4.2. Динамика изменения RMSE при δ = 0,7и δ = 0,9
| Кол-во итераций | 50 | 60 | 70 | 80 | 90 | 100 |
| RMSE при δ = 0,7 | 0,46 | 0,55 | 0,42 | 0,57 | 0,52 | 0,54 |
| RMSE при δ = 0,9 | 0,46 | 0,52 | 0,57 | 0,53 | 0,51 | 0,56 |
Анализ таблицы 4.2 показал, что наилучшее обучение нейро-нечеткой системы вывода было при скорости обучения δ=0,7 и количестве итераций КИ=70 (RMSE=0,42).
Учитывая данные вышеуказанного анализа, сведем в таблицу 4.3 данные, полученные при обучении нейро-нечеткой сети при КИ=70 и δ =0,7.
Таблица 4.3. Моделирование нейро-нечеткой системы при КИ=70 и δ =0,7
| № | Заданное выходное значение НС | Выход НС до обучения | Ошибка | Выход НС после обучения | Ошибка |
| 1 | 2,00 | 3,20 | -1,20 | 1,74 | 0,26 |
| 2 | 2,00 | 3,20 | -1,20 | 1,51 | 0,49 |
| 3 | 1,00 | 3,20 | -2,20 | 1,20 | -0,20 |
| 4 | 4,00 | 3,21 | 0,79 | 4,29 | -0,29 |
| 5 | 5,00 | 3,21 | 1,79 | 4,62 | 0,38 |
| 6 | 3,00 | 3,20 | -0,20 | 2,26 | 0,74 |
| 7 | 5,00 | 3,21 | 1,79 | 4,61 | 0,39 |
| 8 | 1,00 | 3,20 | -2,20 | 1,35 | -0,35 |
| 9 | 2,00 | 3,20 | -1,20 | 1,53 | 0,47 |
| 10 | 1,00 | 3,20 | -2,20 | 1,38 | -0,38 |
| RMSE | До обучения | После обучения | |||
| 1,61 | 0,44 | ||||
По результатам прогнозирования с помощью регрессии и нейро-нечеткой системы вывода выявлено, что использование мягких вычислений позволяет добиться значения RMSE равного 0,42, в то время как метод регрессии лишь 0,69.
Подобная разница является показателем большей точности прогнозирования при использовании нейро-нечетких систем вывода, а, следовательно, и предпочтительности использования мягких вычислений для прогнозирования поведения подвижной платформы в условиях неопределенности.
При прогнозировании процессов, протекающих при движении подвижной платформы, возникает необходимость учета в режиме реального времени внешних воздействий на систему. Традиционным подходом к анализу подобных многофакторных систем являются регрессионные модели [226-228].
Многомерные зависимости, характеризующие показатели качества, учитываются на основе корреляционно-регрессионных моделей, причем многофакторные модели описываются только линейными зависимостями, что является существенным ограничением регрессионных моделей для анализа нелинейных систем. Увеличение производительности подобных систем возможно за счет внедрения в них экспертных знаний о возможности моделирования и/или прогнозирования взаимосвязи между внешними факторами, действующими на мехатронную систему, и количественными показателями, оценивающими эффективность ее работы. В теории нечеткой логики экспертные знания, как правило, формируются на основе лингвистических правил типа «Если ... то...» Далее экспертные оценки преобразуются в математические модели на основе традиционных нечетко-логических алгоритмов. Общей особенностью в указанных работах является построение нечетких баз знаний на основе совокупности жестких нечетких правил управления, при использовании которых невозможно обеспечить аддитивность мехатронной системы, под которой понимается отсутствие реакции на выходе системы при изменении входных параметров.
4.9. Оценка точности нечеткого управления подвижной платформой системы обработки и анализа спектрозональных изображений
При проектировании и дальнейшем моделировании сложных ОЭС, работающих в режиме реального времени для формализованного представления зависимости между входными и выходными параметрами, возникает неопределенность в принятии управляющих решений [229,230].
Данная сложность возникла в связи с тем, что выходные параметры ОЭС не поддаются точному измерению в связи с большим количеством внешних воздействий. На практике возможна лишь приблизительная их оценка.
В связи с этим для решения задачи моделирования сложных технологических процессов все больше находят применение алгоритмы нечетко-логического вывода. Данные алгоритмы позволяют увеличить точность управления ОЭС за счет компенсации внешних воздействий в динамическом режиме.
Однако при практической реализации ОЭС с использованием алгоритмов нечетко-логического вывода возникает ряд проблем, а именно с [231]:
- непрерывной дифференцируемостью функций принадлежности;
- несоблюдением условий разбиения единицы;
- невыполнением условий аддитивности.
Поэтому возникает задача, связанная с возможностью максимально точно моделировать реальные процессы управления сложными системами [232].
Для устранения подобных ошибок рекомендуется использовать мягкие арифметические операции в структуре нечетко-логического вывода.
Рассмотрим MISO-систему, имеющую два входа и один выход. Вначале формируется система нечетких правил управления (НПУ), содержащая двадцать пять НПУ:
1: НПУ1: ЕСЛИ «а есть Λρ> Ω «б есть B1>>ТО «в есть В9»;
2: НПУ2: ЕСЛИ «а есть Λ1> Ω «б есть Б2» ТО «в есть В8»;
3: НПУ2: ЕСЛИ «а есть Λ1> Ω «б есть Б3» ТО «в есть В7»;
4: НПУ2: ЕСЛИ «а есть A1>> Ω «б есть Б4» ТО «в есть В6»;
5: НПУ2: ЕСЛИ «а есть А1» Ω «б есть Б5» ТО «в есть В5»;
24: НПУ4: ЕСЛИ «а есть А5» Ω «б есть Б4» ТО «в есть В2»,
25: НПУ2: ЕСЛИ «а есть А5» Ω «б есть Б5» ТО «в есть В1», где Ω - обозначение операции нахождения минимума.
В качестве операций нахождения минимума используются следующие операции: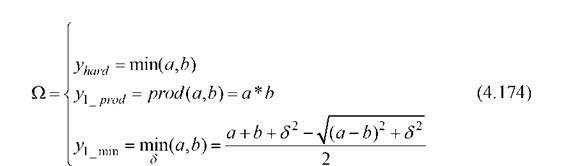
где prod - операция алгебраического умножения; - операция нахождения мягкого минимума, при δ=0,05.
- операция нахождения мягкого минимума, при δ=0,05.
Далее происходит формирование фазифицированного вектора из значений точек пересечения треугольной функции принадлежности с входными переменными. Построенная функция принадлежности имеет треугольный вид.
Следующим шагом работы является определение степеней принадлежности для каждой входной переменной на основе информации, поступающей от систем активного контроля.
Далее необходимо построить матрицу нечетких отношений с использованием (4.174).
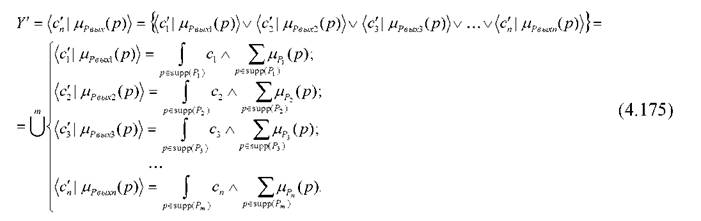
Следующий шаг - это усечение термов выходной переменной, рассчитываемое по следующей формуле:
228

где n- количество правил управления; m- количество нечетких переменных; k - количество термов нечеткой переменной; л - операция взятия минимума.
После того, как проведено усечение термов, проходит их объединение:
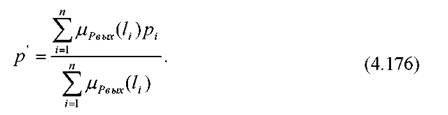
Завершающим этапом является дефаззицикация, которая осуществляется следующим образом:
Более подробно этапы, входящие в реализацию мягкого алгоритма нечеткологического вывода, рассмотрены в работах [233,234].
Было проведено моделирование. Полученные результаты для трех вариантов нахождения минимума в структуре нечеткого вывода сведены в таблицы 4.4-4.6.
Таблица 4.4. Нечеткий вывод на основе жесткого оператора yhard
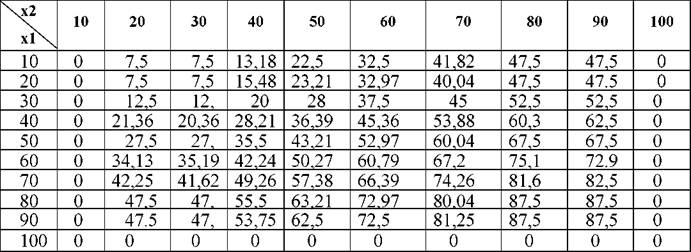
Таблица 4.5. Нечеткий вывод на основе алгебраического произведения ysprod
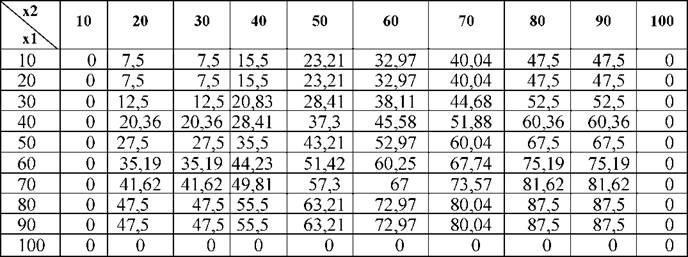
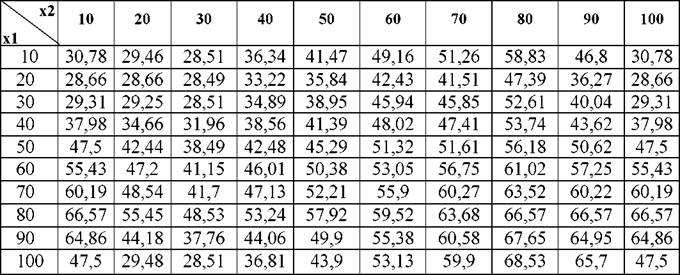
Таблица 4.6. Нечеткий вывод на основе мягкого оператора
Проведенное моделирование показало отсутствие аддитивности алгоритма при использовании жестких операторов. Использование жестких вычислений при ненулевом значении на входе и на выходе дает минимальное значение одной из переменных, при этом изменения значения максимальной (второй) переменной не учитываются.
Функция произведения, использующаяся в мягком выводе ys_prod,при отсутствии на входе нулевых значений дает изменения на выходе MISO-системы при минимальных колебаниях входных величин.
Мягкий нечетко-логический вывод на выходе системы отличен от нулевого результата и обладает свойством аддитивности. Данный алгоритм устраняет ошибку типа «ступенька», то есть нечеткая MISO-система не имеет зон нечувствительности и может быть применена для управления сложными техническими системами.
Расчет RMSEпроводится с целью оценки значения отклонения на выходе системы от эталонной величины. Чем оно меньше, тем большее приближение дает оператор нечетко-логического вывода. Для получения эталонной выборки используется регрессия:

где у1= 67,6, х1= 0, х2= - 0,302 - коэффициенты регрессии.
По полученным коэффициентам регрессии были найдены значения RMSE для каждого из методов нахождения минимума:

где N- количество значений выхода; урег - значения, полученные по формуле
 - значения нечетко-логического вывода для каждого метода (таблицы 4.4-4.6).
- значения нечетко-логического вывода для каждого метода (таблицы 4.4-4.6).
Значения входа и выхода MISO-системы при использовании различных операторов нахождения минимума сведены в таблицу 4.7.
Используя выражение (4.176), были получены следующие значения RMSE
для каждого из способов нахождения минимума:
RMSE hard = 34,33;
RMSE sj,rod = 34,65;
RMSEs mm = 14,51.
Таблица 4.7. Значения входа и выхода MISO-системы при различных операторах нахождения минимума
| а | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
| b | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 |
| yhard | 0 | 7,5 | 12,5 | 28,21 | 43,21 | 60,79 | 74,26 | 87,5 | 87,5 | 0 |
| ys prod | 0 | 7,5 | 12,5 | 28,41 | 43,21 | 60,25 | 73,57 | 87,5 | 87,5 | 0 |
| ys min | 30,78 | 28,66 | 28,5 | 38,56 | 45,29 | 53,05 | 60,27 | 66,57 | 64,95 | 47,5 |
Следует отметить, что чем меньше величина среднего квадратического отклонения, тем ближе к эталонной выборке полученные значения. Расчет показал, что RMSE hardи RMSE s prodпрактически равны, а результат RMSE s min меньше в более чем два раза.
Проведенные исследования показали, что использование мягких арифметических операторов в структуре нечетко-логического вывода уменьшает RMSEи убирает наличие зон нечувствительности, что придает нечетким алгоритмам свойство аддитивности.
Еще по теме Прогнозирование поведения подвижной платформы системы обработки и анализа спектрозональных изображений в условиях неопределенности:
- ОГЛАВЛЕНИЕ
- Прогнозирование поведения подвижной платформы системы обработки и анализа спектрозональных изображений в условиях неопределенности