Обработка пространственных групповых точечных объектов
Групповой точечный объект - изолированное по значениям тех или иных параметров множество из упорядоченных (пронумерованных) точек.
Отдельные точечные объекты в составе пространственных групповых точечных объектов (ПГТО) могут объединяться по различным наборам признаков, например, по признаку пространственной близости, физическому происхождению, яркостным или цветовым характеристикам и т.д.
(рисунок 3.5). Групповые признаки по сравнению с признаками отдельных малоразмерных объектов обладают большей устойчивостью к действию мешающих факторов и имеют более высокую информативность. В качестве примеров изображений ПГТО можно привести такие, как локальные изображения групповых точечныхцелей, строений, опор линий электропередач, расположение антенн сотовой связи, различные дефекты на изготовленных деталях и другие [161].
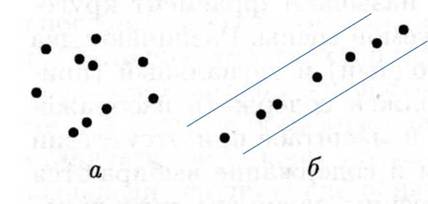
Рисунок 3.5 - Групповые точечные объекты классов «скопление» (а) и «колонна» (б)
Процедурами, связанными с обработкой ПГТО, являются обнаружение отдельных точечных объектов; локализация ПГТО; формирование математических моделей; распознавание на основе этих моделей.
Важными являются вопросы получения адекватных и устойчивых к линейным преобразованиям и действию помех математических моделей ПГТО. При наличии таких моделей задача распознавания объекта эффективно решается известными способами [162].
Один из подходов к получению такой математической модели ПГТО связан с необходимостью упорядочения точек объекта, то есть с правилом перебора «точка за точкой» его отметок (рисунок 3.6).

Разработанная аналитическая модель ПГТО представляет собой замкнутый полигональный контур, условно названный проволочной моделью (рисунок 3.6г):

Представленные в кватернионном виде элементарные векторы контура в определенной последовательности проходят без разветвления через все отметки ПГТО.
Модель задает образ ПГТО в виде выпуклого многогранника (рисунок 3.6в). Для каждой n-й, n = 0,1,...,s-1точки ПГТО был выполнен обоснованный выбор ее соседних точек an-1и an+1.Поскольку форма многогранника не меняется при его переносе или повороте, то установленный закон упорядочения и нумерации точек ПГТО сохраняется при произвольном переносе или повороте объекта. В то же время преобразование сдвига начальной компоненты векторногоописания нарушает нумерацию, но сохраняет упорядоченность точек объекта. Вершины построенного выпуклого многогранника образуют подмножество из всех граничных точек множества точек, составляющих ПГТО. Независимо от порядка выбора точек этого подмножества, построенный выпуклый многогранник является единственным.
Располагая проволочной моделью ПГТО, можно аналитическим путем выполнять различные его преобразования, осуществлять фильтрацию и формировать меры схожести между объектами разных классов, оценивать параметры и распознавать ПГТО.
Задача распознавания является одной из разновидностей задач построения системы обработки зашумленных сигналов с принятием решения. Особенностью такой системы применительно к сигналам в виде изображений групповых точечных объектов является требование его упорядочивания (нумерации). Эта операция должна выполняться как над распознаваемым, так и над каждым из M эталонных сигналов. Операция упорядочения тесно связана с формированием математической модели ПГТО. Получение помехоустойчивой модели распознаваемого объекта из-за действия координатного шума, искажающего положение его отметок, является значительно более сложной задачей по сравнению с получением модели для эталонных ГТО. Фактором, облегчающим ее решение является наличие априорной информации о положении точек распознаваемого объекта, содержащейся в прототипе. Она поступает в устройство распознавания в виде опорных сигналов. Формирователь опорных сигналов  представляет собой вычислитель проволочных моделей эталонных сигналов
представляет собой вычислитель проволочных моделей эталонных сигналов каждого из классов алфавит
каждого из классов алфавит (рисунок 3.7).
(рисунок 3.7).

Рисунок 3.7 - Формирователь опорных сигналов на основе вычислителя проволочных моделей эталонных ПГТО
На рисунке 3.8 приведена обобщенная структура устройства распознавания детерминированного (полностью известного) ПГТО, заданного векторным сигналом векторные представления
векторные представления
прототипа и координатного шума соответственно (значение lнеизвестно).
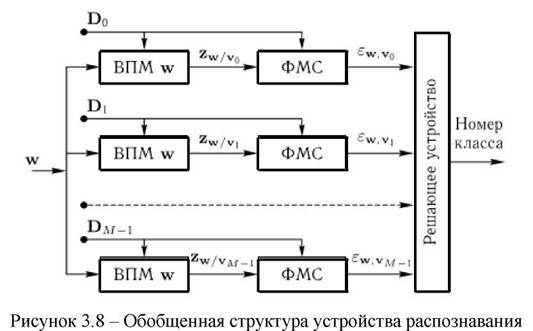
детерминированного пространственного группового точечного объекта, где ВПМ — вычислитель проволочной модели, ФМС — формирователь меры схожести
Устройство является многоканальным по числу классов алфавита A. Сигнал wодновременно подается на входы всех M каналов. Отдельный m-йканал содержит вычислитель проволочной модели zwvзашумленного сигнала wи формирователь меры схожести εmсигналов w и vm, m = 0,1,...,M -1,в виде реальной части их нормированного скалярного произведения εm= (w,zm), m = 0,1,...,M -1. Вычислитель проволочной модели использует для своей работы априорную информацию о расположении точек эталонного ГТО vm.
Поскольку номер прототипа vlнеизвестен, то устройство распознавания вычисляет Mусловных математических моделей г распознаваемого объекта, а формирователь меры схожести εвырабатывает Mее значений с эталонными сигналами алфавита классов. Каждое значение этой меры можно рассматривать в виде значения функции правдоподобия принадлежности распознаваемого сигнала к m-му, m = 0,1,...,M -1,классу алфавита U.Решающее устройство работает по критерию максимального правдоподобия, относя распознаваемый сигнал к классу, номер которого совпадает с номером канала, на выходе которого значение меры схожести максимально.
Устройство распознавания детерминированного ПГТО, структура которого приведена на рисунке 3.8, может оставаться работоспособным при пропусках обнаружения отдельных точек ПГТО, а также при наличии ложных отметок в машинном кадре.
Для повышения устойчивости подобных моделей к интенсивным координатным шумам (к высокому уровню ошибок определения координат точек распознаваемого объекта W)можно применить подход, основанный на использовании априорной информации о положении точек ПГТО Wв пространстве. Такая информация содержится в положениях соответствующих точек прототипа W.В условиях предположения о нормальном законе распределения вероятностей ошибок, получаемых при измерении координат точек распознаваемого детерминированного ПГТО W,текущая точка w(n)будет находиться на минимальном по сравнению с другими точками этого объекта расстоянии от соответствующих точек прототипа Pi.Алгоритм распознавания детерминированных ПГТО, использующий данную априорную информацию, формирует 5математических стробов в виде сфер с центрами в текущих точках эталонного ПГТО каждого из классов алфавита U {U )}M-1.
Размер радиуса сферы зависит от интенсивности координатного шума и допустимого значения вероятности ошибочных решений при распознавании.
Описанная процедура обеспечивает идентификацию соответствующих друг другу точек эталонных объектов и распознаваемого объекта. Ближайшей к центру строба отметке объекта Wприсваивается номер точки эталонного объекта, являющейся центром строба. Особенностью рассмотренного алгоритма распознавания детерминированного объекта Wявляется необходимость адаптации величины радиуса строба к уровню координатного шума. Более низкие, но достаточно неплохие результаты достигаются, если идентифицировать текущую отметку распознаваемого объекта с ближайшей к ней отметкой эталонного объекта.
3.4.4.
Еще по теме Обработка пространственных групповых точечных объектов:
- ОГЛАВЛЕНИЕ
- Обработка пространственных групповых точечных объектов
- ВЫВОДЫ ПО ГЛАВЕ 3
- СПИСОК СОКРАЩЕНИЙ И УСЛОВНЫХ ОБОЗНАЧЕНИЙ
- СПИСОК ЛИТЕРАТУРЫ