Тестирование алгоритма обнаружения
Для иллюстрации работоспособности предложенных алгоритмов рассмотрим простую гибридную систему - прыгающий мячик. Режимное поведение зададим неявной системой дифференциальных уравнений  где у - высота мячика от поверхности отскока, v- скорость движения мячика, a- ускорение свободного падения.
где у - высота мячика от поверхности отскока, v- скорость движения мячика, a- ускорение свободного падения.
Результаты моделирования приведены на рисунке 4.1. При расчетах без контроля динамики событийной функции (рисунок 4.1, а) допускается существенная ошибка eв обнаружении событий. Это приводит к нарушению условия односторонности событий и, как следствие, ошибочному глобальному решению. Использование алгоритма для асимптотического приближения к границе режима (рисунок 4.1, б) обеспечивает точное обнаружение момента смены режима ГС. При приближении к поверхности у = 0 происходит
уменьшение шага интегрирования, а при удалении от границы режима шаг определяется только по критерию точности расчетов.
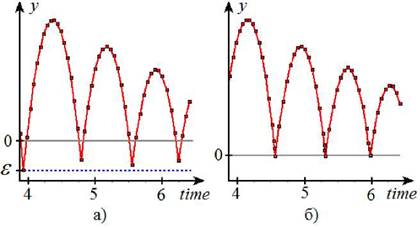
Рисунок 4.1 - Результаты расчета: а) - без учета динамики событийной функции, б) - с использованием алгоритма обнаружения событий
Для сравнения величины ошибки eвследствие неточного обнаружения событий на рисунке 4.2 приведены моменты отскока мячика от поверхности и значения переменной hпри возникновении события.
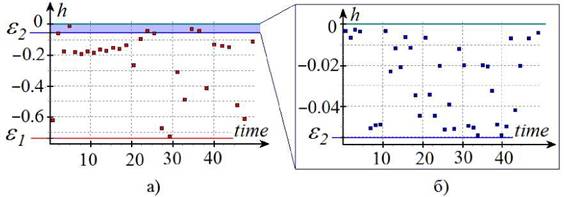
Рисунок 4.2 - Моменты обнаружения событий: а) - без учета динамики событийной функции, б) - с использованием алгоритма обнаружения событий
При расчетах без контроля динамики событийной функции (рисунок
4.2, а) допускается существенная ошибка e∣≈ 0.75 в обнаружении смены
режима. Это приводит к нарушению условия односторонности событий и, как следствие, ошибочному глобальному решению. Использование алгоритма для асимптотического приближения к границе режима (рисунок 4.2, б) обеспечивает на порядок более точное обнаружение момента смены режима ГС, ε2»0.06.
4.2