Динамическая нечеткая модель управления подвижной платформой системы обработки и анализа спектрозональных изображений
С учетом математического аппарата подвижной платформы, описанной в параграфе 4.1, и алгоритмов движения СОАСЗИ, представленных в параграфе 4.2, была разработана динамическая модель управления подвижной платформой СОАСЗИ.
Прежде всего следует рассмотреть применение средств навигации и управления, которые позволяют создавать автоматически управляемые транспортные средства [187,188].
Их интеграция в систему управления позволяет сократить время производства, снизить себестоимость продукции, исключить человеческий фактор и участие человека на опасных участках.
При разработке систем управления подвижной платформой следует
учитывать множество факторов, влияющих на ее работу. Моделирование позволяет осуществить анализ системы управления, а также синтез управляющего устройства без необходимости проведения дорогостоящих экспериментов с физическим объектом.
Существует множество моделей подвижной платформы, каждая из которых строится на некоторых предположениях и имеет свои преимущества и недостатки.
В работе [189] рассматривается модель подвижной платформы, движение которой описывается в матричном виде с использованием уравнений Лагранжа- Максвелла для электромеханической системы.
Для аналогичной схемы в [190] исследована модель, построенная на основе уравнений движения корпуса роботизированного средства и уравнений, отражающих электромеханические процессы, характерные для двигателей постоянного тока с редукторами.
Приведенные модели позволяют структурно представить систему управления подвижной платформой, а применение методов классической теории управления для их анализа затруднительно. С этой точки зрения удобной в использовании является представленная в [191] структурная схема системы управления отклонением подвижной платформы, являющаяся основой математического обеспечения испытательного стенда, описанного в [192]. Основой структурной схемы является модель в виде передаточной функции подвижной платформы при ее движении [193].
Последние указанные модели непосредственно связаны с положением подвижной платформы, однако не демонстрируют ее движение в пространстве.
Рассмотрим структурную схему подвижной платформы СОАСЗИ, представленную на рисунке 4. 11.
Подобную схему шасси имеют управляемые транспортные средства, применяемые на заводе BMW [194,195].
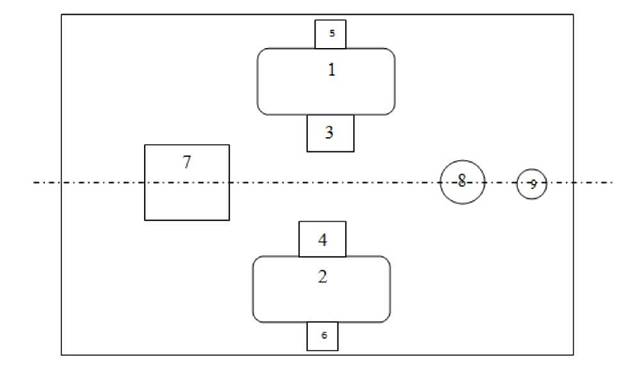
Рисунок 4.11 - Структурная схема подвижной платформы СОАСЗИ: 1, 2 - колеса;
3, 4 - понижающие редукторы; 5, 6 - датчики вращения колес; 7 - бортовое устройство управления; 8 - датчик; 9 - датчик бокового отклонения.
Траектория движения подвижной платформы определяется изменением во времени скоростей вращения ведущих колес 1 и 2, каждое из которых приводится в движение посредством двигателя постоянного тока с понижающими редукторами 3, 4, соответственно. Последний может быть конструктивно выполнен совместно с двигателем и служит для увеличения мощности на выходном валу, соединяемом с колесом. Скорость вращения двигателей регулируется бортовым устройством управления 7, формирующим воздействия на основании сигналов от датчика бокового отклонения 9 и датчиков скоростей вращения колес 5 и 6 при использовании выбранного закона или алгоритма управления. Приближение к точкам, в которых должна происходить остановка подвижной платформы, определяется бортовым устройством управления по сигналу от датчика 8,который распознает наличие маркера, расположенного на некотором расстоянии до точки остановки.
Моделирование проводилось при следующих упрощениях, использующихся в работах [196-200]:
- подвижная платформа СОАСЗИ движется по поверхности в горизонтальной плоскости;
- корпус СОАСЗИ является абсолютно жестким.
Представим в каждый момент времени движение подвижной платформы СОАСЗИ относительно в виде двух взаимосвязанных движений: бокового и продольного. Будем полагать, что управление каждым из рассматриваемых движений осуществляется по своему каналу системы управления.
Заданием для подсистемы управления боковым отклонением является нулевое расстояние центра масс подвижной платформы. При наличии отклонения его значение определяется датчиком, который может иметь различную конструкцию. Пример датчика при индуктивном задании трассы приведен в [201].
В случае оптического задания положение объекта может определяться по разности показаний двух аналоговых датчиков, один из которых расположен левее, а другой - правее. Ошибка рассогласования, соответствующая боковому отклонению, преобразуется бортовым устройством управления в сигнал широтноимпульсной модуляции. Разность средних значений напряжений создает разность скоростей вращения двигателей, редукторов, что приводит к повороту подвижной платформы относительно ее центра масс и изменению бокового отклонения.
Достоинством рассмотренной модели управления движением подвижной платформы СОАСЗИ является декомпозиция системы управления на подсистемы, каждая из которых представляется в виде структурной схемы. Проведенный анализ выявил следующие недостатки, которые предполагается устранить путем синтеза и внедрения регуляторов для каждой подсистемы в отдельности: управление боковым отклонением обладает большими колебательностью и временем регулирования, а для управления положением недостаток заключается в наличии перерегулирования. При этом за счет представления подсистем в виде структурных схем имеется возможность синтеза законов управления методами
как классической, так и современной теории управления.
Другим достоинством представленной выше модели заключается в возможности построения любой конфигурации, заданной в отклонениях траектории движения подвижной платформы в пространстве с учетом взаимосвязи подсистем.
Таким образом, полученная модель дает возможность предварительно исследовать спроектированные законы управления движением подвижной платформы СОАСЗИ.
4.4.
Еще по теме Динамическая нечеткая модель управления подвижной платформой системы обработки и анализа спектрозональных изображений:
- Требования к системе управления предприятием, определяемые концепцией его экономической безопасности
- Адаптивная модель посещения магазинов и принятия решений о покупке
- Память и ее роль в системе обработки информации потребителем. Виды памяти.
- Организация и управление активными операциями коммерческого банка.
- Управление рисками в системе финансового менеджмента.
- Глава 5. Кредитная система России.
- Вопрос 3. Финансовая система РФ.
- 4. Основные задачи и функции органов Федерального казначейства РФ
- 17. Систематизация цветов. Цветовые модели. Атлас цветов Манселла.
- Общество как система. Типология общества
- 1 Реформы государственного управления в России в начале Х1Х в.
- § 23. Средства выражения специальных реалий, категорий, понятий
- 1.1 Учет и контроль как функции управления
- 2.5. Методы исследования
- § 2. Правовая природа организации управления акционерным обществом
- Концептуальные основы формирования моделей экономического поведения предпринимательских структур