Линейные робастные системы
Рассмотрим следующую линейную систему sι

где w(t) - неизвестное возмущение, z(t) - управляемый выход системы, U(t) - управление, подлежащее нахождению.
Предположим, что параметры системы имеют интервальный характер неопределенности

и при этом сохраняются структурные свойства системы (4.50) (управляемость и наблюдаемость). Положим, что что упростит
что упростит
формулировку результата, но не изменит общности постановки задачи. Алгебраическое неравенство Риккати (АШ) для рассматриваемой задачи имеет вид
192  где s(t) положительно определенная матрица. В теории робастных систем при использовании l1-нормы для отыскания управления, организованного по принципу обратной связи, вместо обратимой положительно определенной матрицы Pобычно вводится скалярный показатель
где s(t) положительно определенная матрица. В теории робастных систем при использовании l1-нормы для отыскания управления, организованного по принципу обратной связи, вместо обратимой положительно определенной матрицы Pобычно вводится скалярный показатель
Учитывая интервальный характер параметрической неопределенности объекта (4.50) и неравенство Риккати (4.52), определим структуру нж регулятора и действующего возмущения в виде [212]

где положительно определенная матрица s, содержащая постоянные параметры, удовлетворяет неравенству

Задача синтеза управления вида (4.53) может быть рассмотрена как проблема аналитического конструирования оптимального управления для робастной модели объекта (4.50) при антагонистическом воздействии w(t)

с использованием функционала качества

где матрицы q>о, r>о. Матрица qтакова, что неравенство (4.54) принимает вид
Весовая матрица Р назначена так, что матрица
будет отрицательно полуопределенной (определенной).
В этом случае одна из матриц, удовлетворяющих решению алгебраического уравнения Риккати (ARE)(4.57), будет положительно определенной. Структура управления для объекта (4.50) будет такая же как (4.54), однако матрица Sбудет заменена на положительно определенную матрицу S

С учетом условия выбора параметров робастной модели объекта и .L;(о) = x0, можно утверждать, что

Оценим возможное рассогласование траекторий объекта (4.50) и его робастной модели.
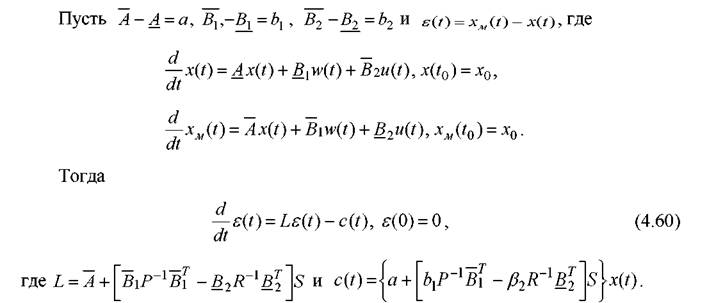
Запишем решение уравнения (4. 60) в виде:
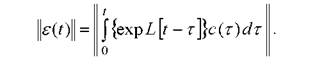
Учитывая, что корни характеристической матрицы Lявляются действительными и отрицательными, можно назначить такие положительные постоянные
194

Как было показано, управление (4.59) обеспечивает системе свойства асимптотической устойчивости, т.е. при t>О. Учитывая, что
при t>О. Учитывая, что
параметрические возмущения принадлежат ограниченной области возможных значений, справедливо считать, что при t>О.
при t>О.
Тогда из (4.61) будем иметь оценку максимально возможного рассогласования траекторий объекта (4.50) и его робастной модели.

4.6.1.
Еще по теме Линейные робастные системы:
- ОГЛАВЛЕНИЕ
- Система стабилизации нелинейного объекта с использованием SDC параметризации
- Линейные робастные системы
- Нелинейные робастные системы