Метод синтеза нелинейных моделей управления подвижной платформой
При решении задач классификации динамических объектов используют математический аппарат нечетких множеств, который позволяет учесть неполноту и неопределенность исходной информации.
В связи с тем, что интеллект человека связан с нечеткой логикой рассуждений, задача классификации сводится к ситуационной модели, трансформирующей множество ситуационных признаков в множество классов ситуаций. Чем больше информации о распознаваемом объекте, тем выше вероятность его соотношения с каким-либо классом. Размерность пространства ситуационных признаков ограничена с одной стороны физической природой объекта и его взаимодействиями с окружающим миром, с другой стороны - количеством иразнообразием информационных каналов, по которым можно получить данные признаки и взаимодействия.
Для реальных динамических объектов ситуационными признаками являются:
- координаты;
- скорость;
- ускорение.
Для каждого конкретного класса существует ограниченный набор базовых (эталонных) ситуаций, определяемый сочетанием базовых ситуационных признаков [203,204]. Текущее состояние объекта выражается как совокупность данных признаков. Далее сопоставляются текущая и эталонная ситуации. Наибольшая близость между ними в каком-либо классе определяет принадлежность объекта к данному классу. Нечеткие ситуационные модели с данным типом представления эталонных ситуаций и прямым продукционным выводом относятся к ситуационным системам типа "ситуация-действие", которые характеризуются относительной простотой формирования продукционных правил, то есть низкими временными затратами на вывод, что немаловажно для систем реального времени.
Пусть нелинейный управляемый объект, в качестве которого используется разработанная СЗСОАИ, описывается векторным дифференциальным уравнением
Здесь T- интервал ∣∕0,т]; Ω - область (открытое связанное множество) Rn, содержащая начало; x∈Rn- состояние системы; - область
- область
возможных начальных состояний системы; - выход системы;
- выход системы;
u ∈ Rr- управление, подлежащее нахождению; - неизвестное
- неизвестное
179
Рассматривая задачу синтеза закона управления СОАСЗИ, как дифференциальную игру двух игроков Uи Wна заданном интервале [Zo, Т], введем функционал

Первое слагаемое (4.15) - взвешенная терминальная оценка качества выполнения задачи дифференциальной игры; матрицы Fи Qмогут быть положительно полуопределенными; матрицы R, P- положительно определенные.
Требования к значениям параметров матриц F, Q, R, Pбудут определены далее.Задача заключается в построении оптимальной стратегии с обратной связью для игроков Uи W.Ограничения на управляющие воздействия учитываются при назначении матриц Rи P.
Следуя [205], оптимальные стратегии с обратной связью для игроков Uи W на заданном интервале ∣Zo, Т ] определяется выражением

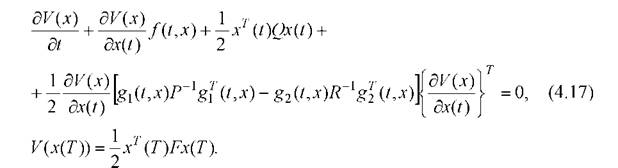
где V(x) - положительно определенная функция, отвечающая уравнению Г амильтона-Якоби
180
Из условия положительной определенности функционала (4.15) следует, что назначения матриц Rи Pдолжны быть такими, чтобы матрица  была бы, по крайней мере, положительно полуопределенной.
была бы, по крайней мере, положительно полуопределенной.
Основная трудность реализации управлений в виде (4.16) заключается в нахождении вектора удовлетворяющего скалярному уравнению
удовлетворяющего скалярному уравнению
(4.17).
Одним из возможных способов нахождения робастного управления с использованием (4.17) является метод, основанный на аппроксимации этого уравнения рядом Тейлора вокруг точки равновесия [206].
Однако метод, основанный на представлении неравенства с частными производными с использованием аппроксимации возле точки равновесия, не позволяет получить более общие решения.
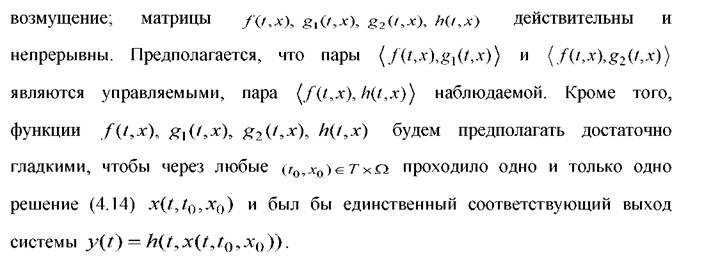
Сделаем ряд предположений относительно матриц f(t,χ), g1(tχ), g2(t,x), h(tχ), представленных в (4.14). Пусть, каково бы ни было ε>0, существуют такие δи T, что где
где 
Из условия (4.
20) следует, что
Из условий (4.19) можно сделать вывод, что
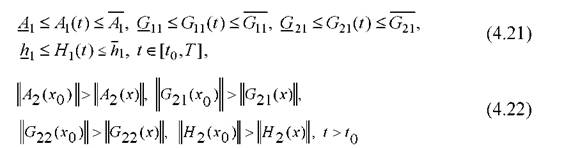
или, объединив условия (4.21) и (4.22), получим

Следует отметить, что представление матриц
f (t,х), g1(t,x), g2(t,x), h(t,х) не является единственным.
Определение. Представление управляемой и наблюдаемой системы в виде

является эквивалентным, если матрицы и
и
 образуют управляемые пары, а матрицы
образуют управляемые пары, а матрицы  образуют наблюдаемую пару при всех возможных
образуют наблюдаемую пару при всех возможных 
Пусть k ≥ 1 количество возможных эквивалентных представлений исходной системы. Далее рассмотрим одну из систем вида (4.24), попадающих под сделанное определение.
Теорема 4.1.Если z(t) является решением дифференциального уравнения с постоянными параметрами

а x(t) возможные решения исходного нелинейного уравнения,

где положительно определенная матрица sявляется решением алгебраического уравнения Риккати:

то при всех возможных (t, x)∈ωсправедливо соотношение
Доказательство.
Так как выражение по крайней мере,
по крайней мере, положительно полуопределенное, то, с учетом (4.23), справедливо следующее неравенство
184
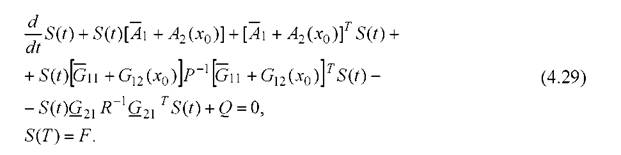
Если определить матрицу sкак решение алгебраического решения уравнения
и принять s (T) равной полученной при решении уравнения (4.30) матрице S, т.е. S(T) = S, (при этом dS/ dt = 0), то уравнения управляющих воздействий будут содержать постоянные параметры

Робастная модель системы с учетом (4.31) принимает вид (4.25), а так как и модель и уравнение, которое использовалось при нахождении матрицы S, содержат предельные значения матриц, то это означает, что при всех возможных  справедливо соотношение
справедливо соотношение
Уравнение (4.31) описывает стратегию с обратной связью в дифференциальной игре для игроков и и w, описываемой динамической системой (4.24). Отметим, что эквивалентное представление системы в виде (4.24) приводит к различным управлениям вида (4.31), так как в уравнениях вида (4.30), решениями которых определяется положительно определенная матрица S, будут содержаться различные матрицы с постоянными параметрами, характеризующим каждое из представлений.
Отметим, что матрица S(T) влияет на значение терминального штрафа, определяющего качество выполнения задачи с заданным временем переходного процесса, то есть на значение взвешенной квадратичной формы xτ(T)Sx(T).
Само же значение x(T)зависит не только от управляющих воздействий (4.31), но и от начальных условий исходной системы. Как видно из уравнения (4.30), на
185 значение матрицы sвлияет выбор матрицы q. Учитывая эти соображения, назначим матрицу qс учетом параметров выхода системы, т.е.

Перепишем (4.30) с учетом (4.32)

Положительно определенная матрица s, как решение уравнения (4.33), в управляющих воздействиях (4.18) обеспечит конечное значение функционала на робастной модели объекта (4.21)

Следствие из теоремы 4.1.Из того обстоятельства, что решение уравнения робастной модели (4.25) на [to] является мажорантой (в том смысле, что  для решений исходной системы с управлениями (4.31)
для решений исходной системы с управлениями (4.31)

следует, что

при всех возможных (t, x) ∈ Ω.
Уточним важное свойство уравнения, исходной динамической системы с управляющими воздействиями (4.31). Перепишем уравнение (4.35) в виде  где
где
186  относительно этих матриц, множество Ωa- замкнутое множество возможных траекторий параметров системы в интервале [t0,т ].
относительно этих матриц, множество Ωa- замкнутое множество возможных траекторий параметров системы в интервале [t0,т ].
Теорема 4.2.Пусть вектор функция φ(χ,a(t,х)) обладает следующими свойствами:
 измерима на множестве &а при любых фиксированных траекториях a(t,х) и соответствующих решениях χa(t), t∈[t0,т] ;
измерима на множестве &а при любых фиксированных траекториях a(t,х) и соответствующих решениях χa(t), t∈[t0,т] ;
 непрерывна по совокупности {χa(t),a(t,х) };
непрерывна по совокупности {χa(t),a(t,х) };
 - постоянные параметры робастной модели системы.
- постоянные параметры робастной модели системы.
 - единственное решение уравнения на интервале
- единственное решение уравнения на интервале В таком случае для каждой траектории изменения параметров
В таком случае для каждой траектории изменения параметров
 существует соответствующее единственное решение задачи (4.38)
существует соответствующее единственное решение задачи (4.38)  и если a(t, х) последовательно от решения к решению устремлять
и если a(t, х) последовательно от решения к решению устремлять  то соответствующие решения х^ (tθ ,т) будут сходиться к z(t0,T).
то соответствующие решения х^ (tθ ,т) будут сходиться к z(t0,T).
Доказательство. При сделанных выше предположениях о непрерывности правой части исходного дифференциального уравнения объекта, справедливо заключение о существовании интегрируемой по Лебегу на интервале [to,т] функции m(t) такой, что, если то
то
 Учитывая, что
Учитывая, что  , решение уравнения (4.37), непрерывно зависит от начальных условий и параметров системы, а, следовательно, если a(t, х) последовательно от
, решение уравнения (4.37), непрерывно зависит от начальных условий и параметров системы, а, следовательно, если a(t, х) последовательно от
187 решения к решению устремлять к то соответствующие
то соответствующие
решения xa(t0,T) будут сходиться к z (t0,T) .
Оценим максимально возможное рассогласование между траекториями робастной модели возможными траекториями исходного объекта с управлениями (4.31).
Уравнение для возможных отклонений имеет вид
Теорема 4.3.Возможный коридор отклонений решений с управлениями (4.30) не превышает величину

Доказательство. Запишем норму решения уравнения (4.41) 
Таким образом, «коридор» возможных решений в робастной дифференциальной игре описывается соотношением

Отсюда имеем (4.43).
Сформулируем требования, которым должна отвечать матрица Lробастной
модели для случая, когда время переходного процесса задано.
Теорема 4.4.Пусть задача управления объектом 
Доказательство. Пусть для робастной модели (4.46) в момент
Допустим, что при всех возможных объект (4.44) с управлениями
объект (4.44) с управлениями
(4.45) асимптотически устойчив. Тогда для робастной модели (4.47) последовательно получаем
Отсюда, учитывая, что имеем (4.48).
имеем (4.48).
Следствие из теоремы 4.4.Учитывая (4.47) и (4.48), получим условие,
которое можно использовать при проверке соответствия решения уравнения  определяющего матрицу s, задаче достижения значения
определяющего матрицу s, задаче достижения значения траекторией,
траекторией,
являющейся решением дифференциального уравнения
с заданными начальными условиями и заданным временем
и заданным временем
переходного процесса T — t0:

Задача синтеза субоптимального стабилизирующего управления СОАСЗИ сведена к построению робастной модели нелинейного объекта с постоянными параметрами, норма состояния которого является мажорантой для нормы состояния исходного объекта.
Таким образом, рассмотрен метод синтеза управления для класса нелинейных неопределенных систем, представимых в эквивалентной форме в виде систем с параметрами, зависящими от состояния [207].
4.4.
Еще по теме Метод синтеза нелинейных моделей управления подвижной платформой:
- 1. Понятие и особенности источников аграрного права
- 5.4. Учет и снижение инвестиционных рисков
- 5.4. Учет и снижение инвестиционных рисков
- 7. Отождествление человека по генетическим признакам
- § 2. МЕТОДЫ КРИМИНАЛИСТИКИ
- 6.Структурные модели коммуникации и их характеристика и отличительные особенности.
- 22 Товарная политика предприятия управление продуктом.
- Управление финансами: задачи, принципы и методы. Система государственных органов управления финансами.
- Финансовое планирование и прогнозирование.
- Социологические методы исследования.
- 1 Реформы государственного управления в России в начале Х1Х в.