Управление объектом с зависящими от его состояния параметрами
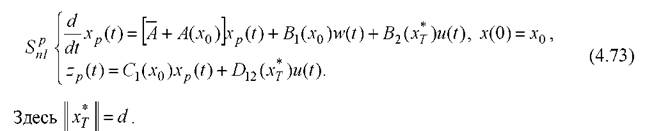
Сформулируем задачу управления объектом (SDC) [213]. Пусть управляемый объект описывается соотношениями (4.69). Необходимо построить управление, асимптотически переводящее систему за заданное время из заданного начального состояния x(0) = xqв некоторую окрестность начала координат

Предположим, что удастся построить такое управление и, учитывая неоднозначность представления нелинейной системы вида (4.63) в виде системы, параметры которой зависят от состояния (4.
69), что класс рассматриваемых систем таков, что их параметры в процессе управления изменяются в соответствующих интервалах:
Построим робастную модель системы:
Организуем управления вида (4.58). Для того чтобы матрица Smсодержала информацию о начальном состоянии объекта и цели управления, назначим весовые матрицы функционала (4.56) Q, R, Pследующим образом:

при этом назначение весового коэффициента γ2должно быть таковым, чтобы матрицебыла бы отрицательно
∕ d
d
полуопределенной (определенной) [214].
Положительно определенная матрица sбудет определяться алгебраическим уравнением Риккати (ARE):

При таком определении матрицы усиления робастного регулятора будет обеспечиваться следующее соотношение
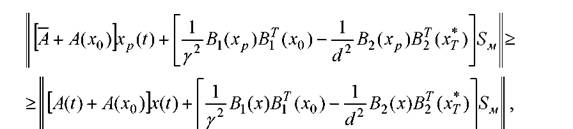
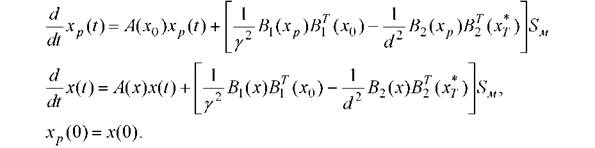
где х p (t) и х(^) являются решениями уравнений
Рассмотрим пример, в котором нелинейный объект Snιописывается следующим дифференциальным уравнением 
Регулятор, синтезированный с использованием модели (4. 76), имеет вид u(t) = —137.12x1(t) + 80.97x2(t). При этом управлении рассогласование между траекториями исходного объекта и его SDC модели нулевое.
4.7.
Еще по теме Управление объектом с зависящими от его состояния параметрами:
- ОГЛАВЛЕНИЕ
- Метод синтеза нелинейных моделей управления подвижной платформой
- Система стабилизации нелинейного объекта с использованием SDC параметризации
- Управление объектом с зависящими от его состояния параметрами
- ВЫВОДЫ ПО ГЛАВЕ 4
- СПИСОК ЛИТЕРАТУРЫ